Autonomous Indoor Pylon
Racing Plane
Designed to navigate an obstacle race course using a motion capture system through PX4. Optimized for maximum manueverability and agility.
To learn more about my past experiences in detail, please navigate to the
respective section
through the menu bar. My resume and contact details can be located through the menu bar as well.
Designed to navigate an obstacle race course using a motion capture system through PX4. Optimized for maximum manueverability and agility.

Autonomous 20 Crazyflie Drone Swarm to celebrate the 50th anniversary of the moon landing. Controlled using python on ROS.
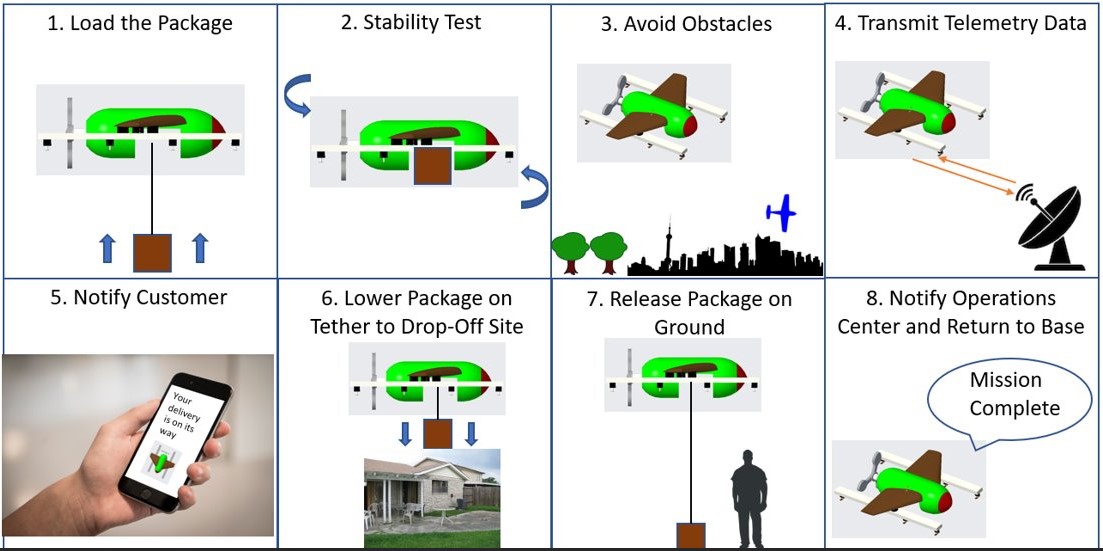
Theoretical design of an autonomous last-mile delivery service that is optimized for small and light packages and compliant with all US FAA Regulations.